
まずは動画をご覧ください
ようやく首から上が出来て少しロボットらしくなりました。
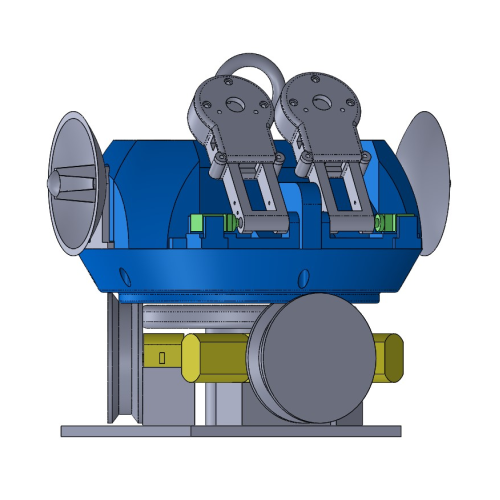
組み立て図とSTLデータ
動画では少し分かりにくいかもしれないのでCADデータの投影図も上げておきます。
STLデータはこちらです。
ChemiCo-SAN/Neck_Base.STL at main · eeAI-works/ChemiCo-SAN · GitHub
Neck_Base.STLとNeck_Rim.STLを追加しています。モーターは減速ギア付の市販のモーターです。Amazonで購入しました。

動画で使用したソフトウェア
ChemiCo-san_earのエクスペリメンタルバージョンを公開します。ChemiCo-SAN/FirmWare/Chemico-san_ear at main · eeAI-works/ChemiCo-SAN · GitHub
左右のマイクロフォンからの音をFFT変換してサーバに送るのと、サーバからの返しで目の角度を変えるのがこのプログラムの役目です。というわけで動態サーバも変更になりますが、今回はトラッキングテストとして画像トラッキングと音声トラッキングの2つのサンプルプロぐラムをアップしています。
画像トラッキング用サーバChemiCo-SAN/tracking_eye.py at main · eeAI-works/ChemiCo-SAN · GitHub
音声トラッキング用サーバChemiCo-SAN/tracking_ear.py at main · eeAI-works/ChemiCo-SAN · GitHub
Flaskで書いていますが今回は簡略化のためデータベース連携を省いていますので前々回のlistenサーバより動かすのは楽かと思います。
首のモーターはArduino MKR WiFi 1010とArduino MKR Motor Carrierを組み合わせて駆動しています。
暫定のドライバープログラムはこちらです。ChemiCo-SAN/FirmWare/Chemico-san_neck_asx00003 at main · eeAI-works/ChemiCo-SAN · GitHub
いちおうこれで動くのですが、MKR Motor Carrierはなんと現在欠品でして、再入荷の目途が立っていません。Mouser Electronicsでは入荷予定が来年の2月になっています。コンパクトにまとまっていて4個のDCモーターを同時に駆動でき、電源の電圧管理もできるので良いと思ったのですが残念です。
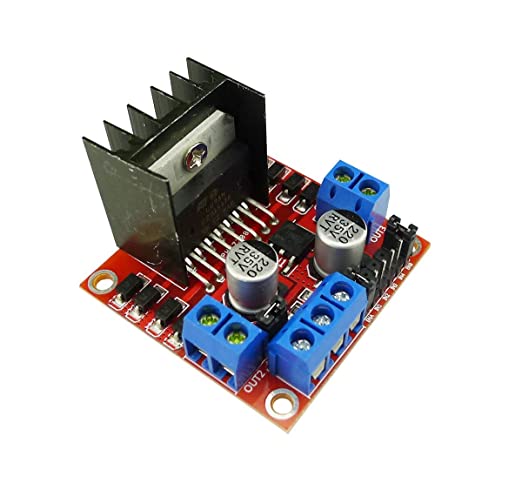
しかたがないのでL298N使用のモータードライバーに変更しようと思っています。


コメント